河北汽車零部件機器人焊鉗工廠
機器人焊鉗的安全性保障主要包括以下幾個方面:1.設計安全性:機器人焊鉗的設計應符合相關的安全標準和規范,如ISO 10218、EN 60204等。設計時應考慮到人員安全和設備安全,如設置安全門、安全光幕、急停按鈕等。2.安全控制系統:機器人焊鉗應配備安全控制系統,包括安全傳感器、安全控制器、安全繼電器等。這些設備可以監測機器人的運動狀態,及時發現異常情況并采取相應的安全措施。3.培訓和教育:機器人焊鉗的操作人員需要接受專業的培訓和教育,了解機器人的工作原理、安全操作規程和應急措施等。同時,操作人員應具備一定的機械和電氣知識,能夠快速判斷和處理機器人故障。4.定期維護和檢查:機器人焊鉗需要定期進行維護和檢查,確保設備的正常運行和安全性。維護和檢查包括清潔、潤滑、更換易損件等,同時也要檢查安全控制系統的運行狀態,及時發現和處理故障。綜上所述,機器人焊鉗的安全性保障需要從設計、控制系統、培訓和教育、維護和檢查等多個方面入手,確保設備的安全運行和人員的安全。機器人焊鉗的操作簡單易學,能夠提高工作效率和生產效益。河北汽車零部件機器人焊鉗工廠
機器人焊鉗的控制系統是由多個部分組成的,包括硬件和軟件。硬件部分包括機器人本身、焊鉗、傳感器、控制器和電源等。軟件部分則包括控制程序、運動規劃、路徑規劃、力控制和通信等。機器人焊鉗的控制系統的運作過程如下:1.運動規劃:根據焊接任務的要求,通過運動規劃算法計算機器人的運動軌跡和速度。2.路徑規劃:根據運動規劃的結果,計算機器人的路徑,確保機器人能夠按照預定的軌跡移動。3.力控制:機器人焊鉗需要對焊接件施加一定的力,以確保焊接質量。通過力傳感器和控制器,控制機器人焊鉗施加的力大小和方向。4.通信:機器人焊鉗的控制系統需要與其他設備進行通信,如與焊接機器、傳感器和計算機等進行數據交換和控制指令傳輸。5.控制程序:機器人焊鉗的控制程序是整個控制系統的重心,它控制機器人的運動、力控制和通信等功能,確保機器人能夠按照預定的軌跡和力度進行焊接。總之,機器人焊鉗的控制系統是一個復雜的系統,需要多個部分協同工作,才能實現高效、精確的焊接任務。山東雙機器人機器人焊鉗型號機器人焊鉗的使用能夠減少環境污染和能源消耗,符合可持續發展的要求。
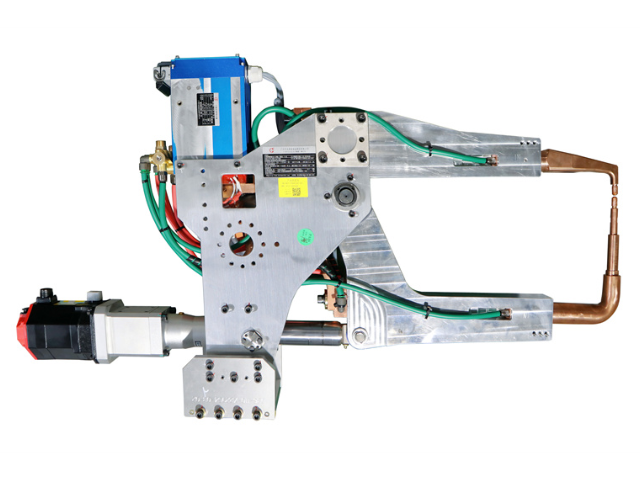
機器人焊鉗的基本原理是通過機器人控制系統控制焊鉗的運動,實現對工件進行焊接。機器人焊鉗主要由機器人控制系統、焊鉗、焊接電源、傳感器等組成。機器人控制系統是機器人焊鉗的主要部分,它通過控制機器人的運動軌跡和焊鉗的動作,實現對工件的精確焊接。焊鉗是機器人焊接的工具,它可以根據需要進行開合、旋轉等動作,以適應不同的焊接需求。焊接電源是機器人焊接的能源,它提供焊接所需的電能和熱能。傳感器可以檢測焊接過程中的溫度、電流、電壓等參數,以保證焊接質量。機器人焊鉗的工作流程一般包括以下幾個步驟:首先,機器人控制系統會根據焊接任務的要求,確定焊接路徑和焊接參數。然后,焊鉗會根據路徑和參數進行動作,將焊接電源提供的電能和熱能傳遞到工件上,完成焊接過程。除此之外,傳感器會對焊接質量進行檢測和監控,以確保焊接質量符合要求。機器人焊鉗的優點是可以實現高精度、高效率的焊接,可以適應不同的焊接需求,同時還可以減少人工操作的風險和勞動強度。因此,在現代制造業中,機器人焊鉗已經成為一種重要的焊接工具。
機器人焊鉗的工作原理是通過控制系統控制機器人的運動,使其按照預定的路徑和速度進行運動,同時通過傳感器感知焊接過程中的溫度、電流、電壓等參數,實現焊接的自動化。具體來說,機器人焊鉗的工作原理包括以下幾個方面:1.控制系統:機器人焊鉗的控制系統包括硬件和軟件兩部分,硬件包括電機、傳感器、控制器等,軟件包括程序和算法。控制系統可以實現機器人的運動控制、焊接參數的控制和監測等功能。2.機械結構:機器人焊鉗的機械結構包括機械臂、焊鉗、傳動系統等,機械臂可以實現多自由度的運動,焊鉗可以實現焊接操作,傳動系統可以將電機的轉動轉化為機械臂的運動。3.傳感器:機器人焊鉗的傳感器可以感知焊接過程中的溫度、電流、電壓等參數,通過傳感器的反饋,控制系統可以實時調整焊接參數,保證焊接質量。4.焊接參數:機器人焊鉗的焊接參數包括焊接電流、電壓、速度、焊接時間等,這些參數可以根據焊接材料和焊接要求進行調整,以保證焊接質量。綜上所述,機器人焊鉗的工作原理是通過控制系統控制機器人的運動和焊接參數,實現焊接的自動化。機器人焊鉗具有高效、精確、穩定的特點,可以提高焊接效率和質量。機器人焊鉗具有高度的可編程性,可以根據不同的焊接需求進行定制化設置。

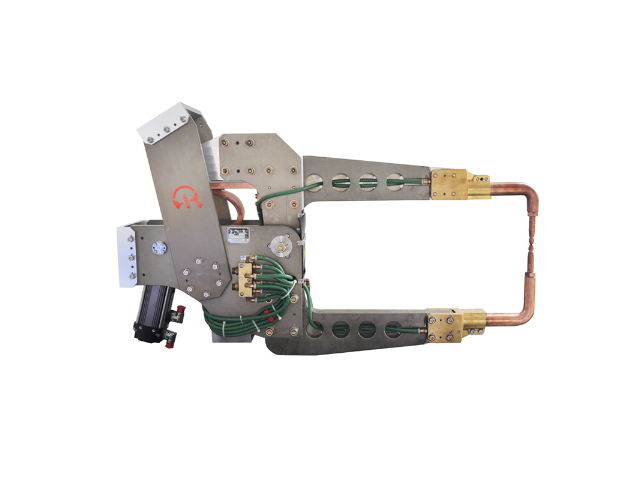
機器人焊鉗常見的故障有以下幾種:1.焊鉗夾緊不牢:可能是夾緊力度不夠,需要調整夾緊力度;也可能是夾緊機構損壞,需要更換夾緊機構。2.焊鉗夾緊不平衡:可能是夾緊機構不平衡,需要調整夾緊機構;也可能是夾緊機構損壞,需要更換夾緊機構。3.焊鉗夾緊后松動:可能是夾緊機構損壞,需要更換夾緊機構;也可能是夾緊力度不夠,需要調整夾緊力度。4.焊鉗夾緊后無法松開:可能是夾緊機構損壞,需要更換夾緊機構;也可能是夾緊力度過大,需要調整夾緊力度。5.焊鉗夾緊機構卡死:可能是機構內部零件損壞,需要更換零件;也可能是機構內部積塵過多,需要清洗維護。解決這些故障的方法包括:調整夾緊力度、更換夾緊機構、更換零件、清洗維護等。同時,對機器人焊鉗進行定期維護和保養,可以有效預防故障的發生。機器人焊鉗具有靈活性強、適應性廣的特點,能夠適應不同形狀、大小的工件。山東模塊化機器人焊鉗費用
機器人焊鉗采用先進的自動化技術,能夠實現高質量的焊接效果。河北汽車零部件機器人焊鉗工廠
機器人焊鉗在焊接過程中需要保證安全性,主要有以下幾個方面:1.安全防護措施:機器人焊鉗需要配備安全防護措施,如安裝安全光幕、安全門等,以避免操作人員誤入危險區域。2.焊接參數控制:機器人焊鉗需要根據焊接材料和工件的特性,設置合適的焊接參數,如電流、電壓、焊接速度等,以保證焊接質量和安全性。3.機器人姿態控制:機器人焊鉗需要根據工件的形狀和大小,調整機器人的姿態,以保證焊接的準確性和安全性。4.緊急停止控制:機器人焊鉗需要配備緊急停止控制裝置,如急停按鈕、安全繩等,以在緊急情況下及時停止機器人的運動,保證操作人員的安全。5.定期維護保養:機器人焊鉗需要定期進行維護保養,如更換磨損的零部件、檢查電氣系統等,以保證機器人的正常運行和安全性。綜上所述,機器人焊鉗在焊接過程中需要采取多種措施,以保證操作人員的安全和焊接質量。河北汽車零部件機器人焊鉗工廠
- 重慶微波爐箱體儲能焊機 2025-01-08
- 北京電容式儲能焊機電路圖 2025-01-08
- 廊坊汽車鈑金件儲能焊機批發 2025-01-08
- 重慶大功率儲能焊機設備 2025-01-08
- 全自動儲能焊機價格 2025-01-08
- 江蘇電容式儲能焊機型號 2025-01-08
- 重慶水泵葉片儲能焊機品牌排行 2025-01-08
- 湖南微波爐箱體儲能焊機 2025-01-08
- 寧德電容式儲能焊機型號 2025-01-07
- 西安多頭點焊機 2025-01-07
- AMAT Faceplate代理商推薦 2025-01-08
- 四川金屬噸桶定制 2025-01-08
- 莆田壓鑄油溫機哪家好 2025-01-08
- 深圳大幅面激光打標機價位多少 2025-01-08
- 武漢智能軌跡車遙控器供應 2025-01-08
- CAT柴油機礦山泵比較好 2025-01-08
- 合肥平面磁力磁性聯軸器批發價格 2025-01-08
- 新疆博結成戶外電源廠家 2025-01-08
- 鼓樓區R系列直聯減速電機R系列斜齒輪減速機選型 2025-01-08
- 河北安全閥門價格優惠 2025-01-08