-
 升降電缸執行標準
升降電缸執行標準高精度化:隨著工業自動化水平的提高,對電缸的精度要求也越來越高。高精度電缸能夠實現更精確的位置控制和更穩定的速度調節,因此在裝備制造、精密加工等領域有著廣泛的應用前景。智能化:智能化是電缸未來發展的重要方向之一。通過引入傳感器、控制器等智能元件,電缸可以實現自適應控制、自主學習等功能,進一步提高電缸的性能和智能化水平。模塊化與組合化:為了滿足不同領域和不同應用場景的需求,電缸正朝著模塊化與組合化的方向發展。通過模塊化和組合化設計,電缸可以更加靈活地適應不同的安裝和使用環境,并且便于維護和升級。高速化與高效率:為了提高生產效率和加工質量,電缸正朝著高速化與高效率的方向發展。通過優化電...
-
 江蘇滑塊電缸
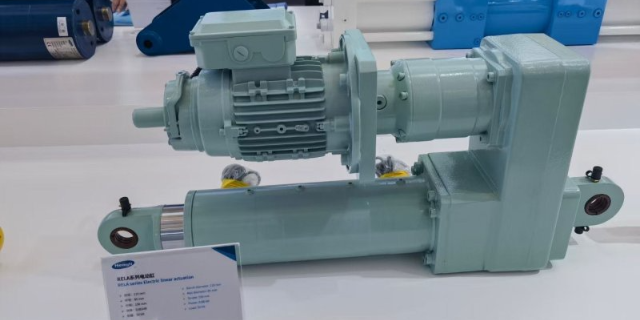
江蘇滑塊電缸電缸與電機的匹配關系主要體現在以下幾個方面:功率匹配:電機的功率應滿足電缸的推力和速度需求。根據電缸的推力、速度和運行時間,選擇合適的電機功率。如果電機功率過小,可能導致電缸無法正常運行;如果電機功率過大,則可能造成能源浪費和電機過熱等問題。扭矩匹配:電機的扭矩應滿足電缸的推力和運行需求。不同品牌和型號的電機扭矩不同,應根據電缸的推力需求選擇合適的電機型號。同時,還需要考慮電機的轉速和減速器的減速比等因素,以確保電缸能夠正常運行。控制精度匹配:電機的控制精度應滿足電缸的控制精度要求。如果電機的控制精度不夠高,可能導致電缸的運動軌跡不準確,影響設備的性能和精度。因此,在選擇電機時,應...
-
 自動化電缸技術參數
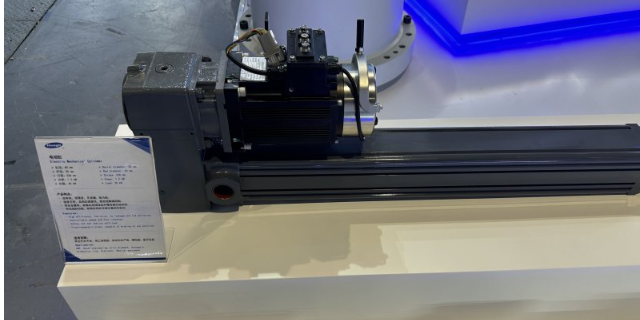
自動化電缸技術參數電缸的主要部件主要包括以下幾個部分:電機:電機是電缸的主要驅動部分,通過電能轉化為機械能,驅動電缸的運動。常見的電機類型包括直流電機和交流電機,根據實際應用需求選擇合適的電機類型。齒輪傳動系統:齒輪傳動系統用于將電機的旋轉運動轉化為直線運動。它由齒輪、齒條和傳動裝置等組成。電機的旋轉運動通過齒輪傳動到齒條上,從而實現電缸的直線運動。導軌:導軌是電缸的支撐結構,用于引導電缸的運動。它通常由金屬材料制成,具有耐磨性。導軌的設計和制造質量直接影響電缸的運動平穩性和精度。傳感器:傳感器用于檢測電缸的位置和運動狀態,并將信號傳輸給控制系統。根據實際需求選擇合適的傳感器類型,例如光電編碼器、磁...
-
江蘇電缸推桿
電缸在電子裝配自動化中扮演著至關重要的角色。它們通過提供精確、快速和可靠的運動控制,使得裝配過程能夠實現高效自動化。以下是電缸在電子裝配自動化中的具體作用:精確控制:電缸具有高精度的位置控制能力,可以確保裝配組件的準確定位。這對于電子裝配來說至關重要,因為許多電子元件需要在非常精確的位置上進行安裝,以確保其正常工作。電缸通過閉環伺服控制系統,可以實時監測和調整位置,確保裝配的精確性。快速運動:電缸能夠以高速度進行運動,這使得裝配過程能夠迅速完成。在電子裝配中,生產線的速度往往對整體生產效率產生直接影響。電缸的快速響應和高速度運動能力有助于提高裝配速度,從而增加產量。可靠穩定:電缸具...
-
伺服電缸編號
除了自動化生產線、物流設備、包裝設備、印刷設備、組裝和檢測設備外,還有其他常見的工業自動化設備使用到電缸。例如:測試設備:在測試設備中,電缸可以用于各種測試系統的定位、夾緊和運動控制,實現高精度、高效率的測試任務。例如,在電子產品測試中,電缸可以用于測試儀器的探頭移動和定位。機器人手臂:在機器人手臂中,電缸可以作為關節驅動器,實現機器人手臂的運動和定位。通過電缸的控制,機器人手臂可以實現各種復雜的動作和任務。液壓系統:在液壓系統中,電缸可以作為液壓泵或液壓馬達使用,實現液壓系統的壓力控制和運動控制。例如,在注塑機中,電缸可以用于控制模具的開合和注射器的運動。自動化儀表:在自動化儀表...
-
浙江恒立電缸
在檢查電缸部件時,需要注意以下幾個方面:檢查電缸的外觀:檢查電缸的外表面是否有刮痕、磨損、腐蝕或其他損傷。這些損傷會影響電缸的使用壽命和性能。檢查密封件:密封件是防止電缸內部潤滑劑外泄和外部污染物進入的重要部件。檢查密封件的完好性和緊固情況,如果發現密封件老化或損壞,應及時更換。檢查油位和油質:電缸在使用過程中會產生一定的熱量,需要潤滑劑進行潤滑。檢查油位是否正常,油質是否清潔,如果油位過低或油質變臟,應及時補充或更換潤滑油。檢查傳感器和電機:傳感器和電機是電缸的重要組成部分,直接影響電缸的正常運行。檢查傳感器和電機的外觀是否完好,工作是否正常,如果有異常情況,應及時處理或更換。檢...
-
 非標定制電缸結構
非標定制電缸結構電缸與上位機之間的通信協議是一種用于實現兩者之間數據交換的規則和標準。通過通信協議,上位機可以對電缸進行控制,同時也可以獲取電缸的狀態信息。通信協議包括硬件接口和軟件協議兩個部分。硬件接口定義了通信所使用的物理介質和連接器類型,常見的包括串口、USB、以太網等。軟件協議則定義了數據傳輸的格式、命令集、數據校驗等內容,用于保證數據傳輸的正確性和可靠性。在選擇通信協議時,需要考慮以下幾個因素:通信速度:通信速度決定了數據傳輸的快慢,需要根據實際需求進行選擇。數據傳輸質量:數據傳輸質量決定了數據傳輸的準確性和穩定性,需要選擇可靠性高的協議。設備兼容性:需要考慮所選協議是否被多數支持,以及...
-
安徽購買電缸
電缸在工業自動化中的應用非常廣,涉及到各種場景。以下是一些常見的電缸在工業自動化中的應用場景:自動化生產線:在自動化生產線中,電缸可以用于傳送帶、分揀機、裝配機、焊接機器人等各種設備,實現自動化生產線的智能化控制。例如,在汽車制造業中,電缸可以應用于車身焊接機器人和裝配線的自動化操作,實現汽車部件的定位和組裝。物流設備:在物流設備中,電缸可以用于輸送機、提升機、堆垛機、搬運機等設備,實現物料的自動化輸送和堆垛操作。通過電缸的精確控制,可以實現貨物的快速、準確輸送和堆放,提高物流效率。包裝設備:在包裝設備中,電缸可以用于封口機、貼標機、打包機等設備,實現自動化的包裝操作。通過電缸的控...
-
湖南電缸響
電缸的輸出力與電機功率之間存在直接的關系。一般來說,電機功率越大,電缸的輸出力也越大。這是因為電機的功率決定了電缸的驅動力,而驅動力的大小直接決定了電缸能夠產生的力的大小。在選擇電缸和電機時,需要考慮實際應用場景下的負載需求。如果負載較重,需要較大的輸出力,就需要選擇更高功率的電機。同時,還需要考慮電機的轉速和減速器的減速比等因素,以確保電缸能夠滿足實際應用中的推力和速度需求。需要注意的是,電機的功率并不是決定因素。電缸的輸出力還受到其他因素的影響,如傳動機構的設計和材料、導軌的質量和精度等。因此,在選擇電缸和電機時,需要綜合考慮各種因素,選擇適合自己應用場景的電缸結構。電機的功率...
-
 上海電缸發展
上海電缸發展工業機器人中,電缸通過其機械結構和電動機系統共同實現線性運動控制。具體來說,電缸的線性運動控制過程如下:控制器:工業機器人的控制器根據編程指令和反饋信息計算出機器人所需的運動軌跡和馬達控制信號,以確保機器人按照指定的軌跡和速度進行線性運動。伺服馬達:伺服馬達是電缸的重要驅動組件,能夠將電能轉化為機械能。通過控制器發出的指令,伺服馬達驅動電缸進行線性運動。編碼器:編碼器用于反饋電機的實時位置信息,控制器根據編碼器的反饋信息計算出機器人實際位置與目標位置的偏差,并調整控制信號以糾正偏差,實現閉環控制。傳動機構:傳動機構包括齒輪箱和滑塊等部件,用于將伺服馬達的轉速轉化為電缸所需的扭矩,并...
-
升降電缸發展
在機器人領域,電缸的應用場景主要包括:工業機器人:電缸是工業機器人中常用的執行機構,能夠實現機器人的線性運動控制。在工業生產線上,電缸驅動的機器人可以實現各種復雜的裝配、搬運、焊接、涂裝等任務,提高生產效率和產品質量。服務機器人:服務機器人在醫療、餐飲、家庭等場景中應用,而電缸作為服務機器人的重要執行機構,能夠實現機器人的定位和運動控制。例如,在醫療領域,電缸驅動的機器人可以實現手術過程中的精細操作,提高手術成功率。特種機器人:特種機器人如水下機器人、太空機器人等,需要在特殊環境中進行高精度和高可靠性的運動控制。電缸作為特種機器人的重要執行機構,能夠提供穩定可靠的動力輸出,實現機器...
-
浙江電缸電機
伺服壓機和電缸在控制系統和用途上有明顯的區別。伺服壓機是一種高精度、高效率、高剛性的液壓機床,由液壓系統、傳動系統和控制系統三部分組成。它通過數字信號控制系統,精確地控制壓力、流量和位置等參數。伺服壓機具有壓力穩定、響應快、重復精度高等特點,適合加工精度要求高的零部件,如汽車發動機缸套、曲軸箱和鑄件等。電缸則是一種基于直線電機原理的執行機構,它將電能轉換成直線運動。電缸不僅可以單獨使用,也可以多個聯動使用以實現更復雜的動作。電缸的主要特點是結構緊湊、功率密度高、運動平穩等。電缸廣泛應用于冶金、造紙、印刷、橡膠、塑料等行業的自動化生產線,如注塑機、吹塑機、印刷機械等。在控制方式上,伺...