-
 山西RV1126處理板圖像識別模塊軟件開發
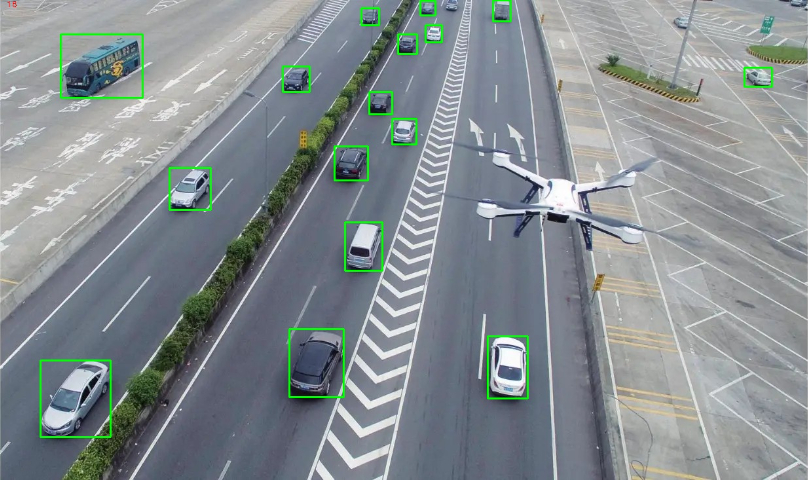
山西RV1126處理板圖像識別模塊軟件開發無人機用于目標識別跟蹤具有靈活便捷的優勢,從高空俯瞰,視野也很廣闊,但是如果飛行高度越高,就會造成視覺上地面目標變小的情況,這時候如果無人機所攜帶的攝像頭像素不足,則容易跟丟目標。這個難點采用成都慧視光電的AI圖像處理板可以有效解決。慧視AI目標跟蹤基于我司開...
2025-01-22 -
 天津流暢目標識別系統
天津流暢目標識別系統八月前夕,國家領導團隊就推進現代邊海空防建設進行第十六次集體學習。指出要優化人民防空建設模式,構建現代人民防空體系。邊海防是維護邊防重要方式之一,為了應對迅速變化的環境以及國際形勢,就需要對邊海防模式進行升級,堅持系統觀念,強化全局統籌,利用科技賦能,提高衛國...
2025-01-22 -
 重慶國產化圖像識別模塊系統
重慶國產化圖像識別模塊系統無人機及其相關技術的不斷發展,已經打破了傳統的倉儲管理方式,為倉儲帶來了智能化的革新。傳統的倉儲管理,需要人工進行地毯式巡檢,這種方式效率低,費時費力。另外,對于倉儲安全的監管不能做到時效性,反應速度也具有滯后性。而全新的無人機巡檢模式,基于先進的圖像傳感器、...
2025-01-21 -
 重慶性價比高圖像識別模塊識別
重慶性價比高圖像識別模塊識別多邊形標注能夠能夠幫助我們標注一些規則復雜的物體,如動物、人、車、建筑物等,與矩形標注框等方法相比,多邊形標注更能精確展示被標注物體的形狀、大小以及實時形態,通過大量的多邊形標注工作,能夠更好的幫助我們提高算法模型的準確性和魯棒性。傳統的多邊形標注方法中,標注...
2025-01-21 -
 四川國產化圖像識別模塊方法
四川國產化圖像識別模塊方法雖然現在各種公共交通已十分便捷,但是仍然存在許多無證、無資質的非法車輛,這些車輛無視交通法規,所以超速超載,儼然成為公路安全隱患。例如在車站出入口,經常會有很多人進行拉客,雖然說是坐滿就走,但是為了利益比較大化,超員那是常有的事。再比如暑期來臨,各種培訓班、托...
2025-01-21 -
 安全圖像標注多少錢
安全圖像標注多少錢深度學習技術,特別是神經網絡,已經在圖像和語音跟蹤領域取得了不小的進展。這些技術可以應用于物聯網設備,實現更加智能化的交互和控制。物聯網、人工智能和大數據的融合正在開啟一個智能化的新紀元。這種融合不僅推動了技術革新,還為各行各業帶來了深刻的變革。隨著技術的不斷...
2025-01-20 -
 四川RK3399處理板圖像識別模塊人工智能芯片
四川RK3399處理板圖像識別模塊人工智能芯片無人機只需要從基地起飛,就能夠對指定區域進行巡檢,智能攝像頭能夠自動問診地面,識別護欄錯位、路面積水、凹陷、裂縫、交通事故、車流異常等問題,然后標記位置。而控制中心能夠實時查看前方畫面,接收無人機回傳的數據,并進行診斷分析,整個過程無需過多的人工干預。這種無人...
2025-01-20 -
 河北高效圖像標注優勢
河北高效圖像標注優勢隨著科技的不斷進步,食品檢測設備也在持續創新升級。光譜分析技術、色譜技術、生物傳感技術等先進技術被廣泛應用于食品檢測領域,使得檢測更加高效、準確、靈敏。例如,基于納米技術的傳感器能夠檢測出極其微量的有害物質,為食品安全提供了更為可靠的保障。同時,智能化、自動化...
2025-01-20 -
 廣東性價比突出激光測距技術
廣東性價比突出激光測距技術?在大型貨輪遠洋航行時,使用激光測距傳感器,可以測量船與船之間的距離以及船與船之間的相對速度,這種方法可以彌補遠洋航輪在外面信號弱的缺點。除此之外,停留??在船舶運動過程中,激光測距還可以用于檢測從船舶到碼頭或另一艘船??的相對距離和速度船舶根據激光測距傳感器...
2025-01-19 -
 江蘇安全圖像標注功能
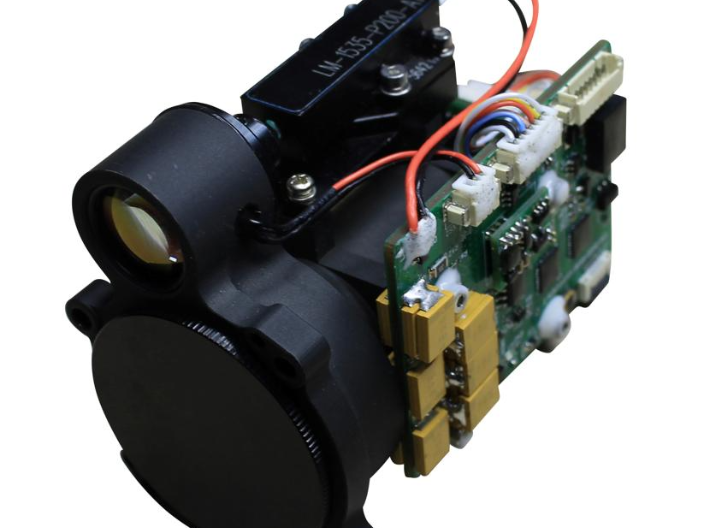
江蘇安全圖像標注功能首先攝像機采用的是可見光高清攝像機,具備1920*1080的分辨率,系統視場31.11°×17.8°,其中搜索視場15.8°×15.8°(1080P像素)。而圖像處理則采用慧視開發的RV1126高性能圖像處理板,之所以采用這塊板卡,一方面得益于其低功耗、微型外...
2025-01-19 -
湖北信息化圖像標注大概價格
在許多領域,無人機的作業環境相對復雜,需要識別處理圖像背景目標眾多,這種環境下,要想實現更高精度的檢測識別效果,圖像處理板的性能至關重要。在慧視光電開發的多款圖像處理板中,Viztra-HE030圖像處理板以6.0TOPS得以勝任。這款板卡采用了瑞芯微旗艦級芯...
2025-01-18 -
 河南高效圖像標注應用
河南高效圖像標注應用SpeedDP的出現則正好解決了這一問題,它是一個基于瑞芯微的深度學習算法開發平臺,提供從數據標注、模型訓練、測試驗證到RockChip嵌入式硬件平臺模型部署的可視化AI開發功能。平臺支持本地化服務器部署,高校、特殊單位等數據敏感的用戶無需擔心數據信息泄露的問...
2025-01-18 -
 湖北哪里有圖像標注功能
湖北哪里有圖像標注功能騰訊開發的機器人小五,采用輪、腿、足復合設計,使得它具備越障能力的同時,也保持了輪式機器人的運行效率。每條腿都可以單獨伸長縮短,能有效提升承載能力。裝上了雙編碼器大扭矩密度的執行器后,就能承受住一般成年人的重量。將機器人用于養老服務領域,能夠幫老人取快遞,抱老...
2025-01-18 -
 湖北信息化圖像標注什么價格
湖北信息化圖像標注什么價格YOLO系列算法是目標識別領域很重要的技術之一,因為性能強大、消耗算力較少,一直以來都是實時目標檢測領域的主要范式。該框架被大量用于各種實際應用,包括自動駕駛、監控和物流等行業的目標識別。自今年2月YOLOv9發布以后,近期,清華又推出了YOLOv10,作為計...
2025-01-18 -
 浙江多系統適配圖像標注哪里買
浙江多系統適配圖像標注哪里買小興安嶺的日常巡護,是構筑東北生態安全的必要措施,進入冬季,整個小興安嶺將處于冰雪覆蓋,按照傳統的巡檢模式,危險且費力。整個小興安嶺森林覆蓋率達到96%,只靠肉眼的觀察,很容易錯過死角空白區的潛在危險,因此,無人機上線了。將無人機智能化,在吊艙的基礎上加裝具備...
2025-01-18 -
河南多系統適配圖像標注功能
目前,采用圖像識別技術來實現無人機規避其他障礙物是一個有效的方法。通過在無人機上植入圖像識別模塊,這個模塊由圖像處理板和相機組合而成,通過算法的賦能,就能針對不同物體實現快速AI識別,然后實現規避。而在圖像處理板的選擇上,成都慧視開發的Viztra-LE026...
2025-01-18 -
安徽多系統適配圖像標注有哪些
無人裝備作戰狼群,有“狼”負責偵查,有“狼”負責打擊,而有的“狼”則負責后勤保障,這種無人裝備集群作戰能夠有效輔助特種作戰。“機器狼”的升級之所以能夠滿足多樣化的任務,得益于其智能化的建設。就是下面這樣的一個"智慧眼"的加入,使得機器狼能夠自主完成許多任務。這...
2025-01-17 -
 企業圖像標注有哪些
企業圖像標注有哪些多邊形標注能夠能夠幫助我們標注一些規則復雜的物體,如動物、人、車、建筑物等,與矩形標注框等方法相比,多邊形標注更能精確展示被標注物體的形狀、大小以及實時形態,通過大量的多邊形標注工作,能夠更好的幫助我們提高算法模型的準確性和魯棒性。傳統的多邊形標注方法中,標注...
2025-01-17 -
 云南高精度激光測距廠家
云南高精度激光測距廠家在測繪領域,我們經常會遇到一些人力無法觸及的地方或者領域,這些地方要么比較危險,要么人工測量十分不便,這時候就可以用到激光測距儀,采用相位式激光測距利用無線電波段的頻率,對激光束進行幅度調制并測定調制光往返一次所產生的相位延遲,再根據調制光的波長,換算此相位延...
2025-01-17 -
 河北高效圖像標注多少錢
河北高效圖像標注多少錢圖像識別以圖像處理為基礎,是指以圖像為對象所開展的各種處理性工作,包括編碼、壓縮、復原及分割等。圖像處理過程中,以圖像輸入后,一般情況下也會通過圖像形態進行輸出。在圖像識別過程中,將處理后的圖像輸入,一般情況下輸出類別與圖像結構分析。也就是說,圖像識別是一個自...
2025-01-17 -
西藏省時省力圖像標注多少錢
而維修機器人則能夠通過圖像識別、精細遠程控制技術,實現遠程快速維修,通過加裝高性能圖像處理板,機器人能夠精細電網缺陷以及損壞程度,并通過攝像頭實時回傳高清畫面,工程師只需要遠程操控機器人進行修補,實現精細縫合。整個過程只需要極少數的人員參與,整個巡檢維修的時間...
2025-01-17 -
云南圖像標注技術
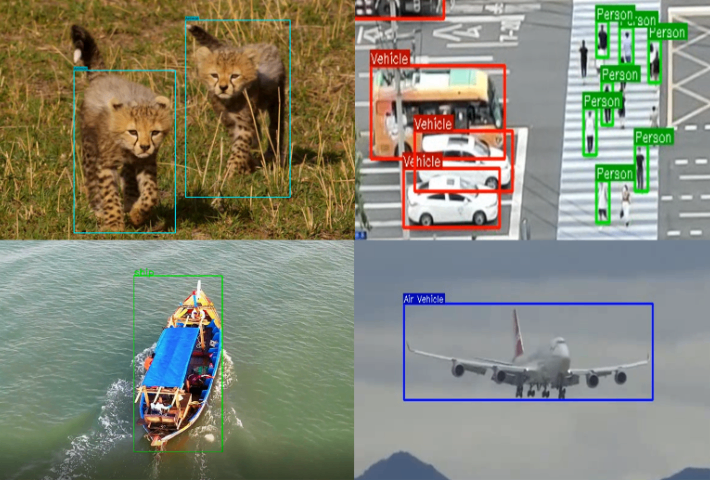
即使是十分復雜的照片也可以使用機器學習進行分割,這也可以尋找異常情況。利用圖像分割,計算機可以把一張圖片分成其邏輯組成部分。例如,其可以根據車窗、擋風玻璃、車輪和轉向等特征對汽車進行分類。由于圖像分割,其可以區分幾個邏輯部分。慧視光電自研的AI智能算法,具備不...
2025-01-17 -
海南安全圖像標注多少錢
成都慧視推出的深度學習算法開發平臺SpeedDP,它的主要功能就是幫助進行算法模型的測試驗證,進行快速的針對大量數據的AI自動標注,然后提升自身算法能力。在無人機智能炮彈測試驗證中,通過對原始算法的模型訓練,能夠不斷評估算法的能力,然后對新的打擊數據集目標進行...
2025-01-17 -
 吉林如何圖像標注有哪些
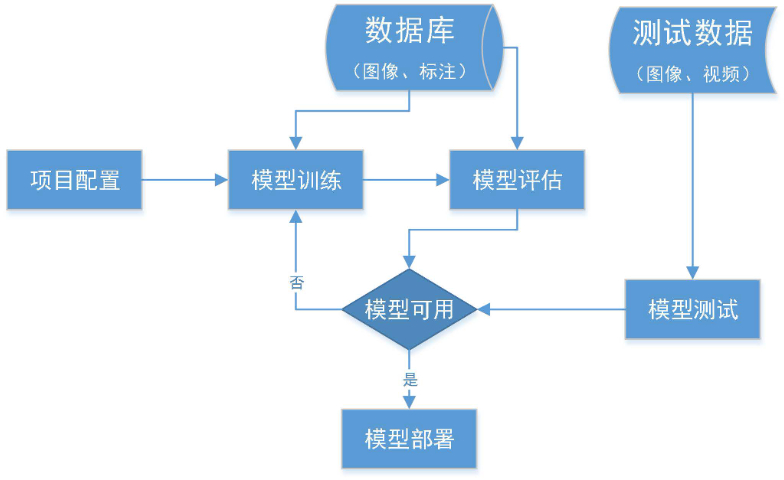
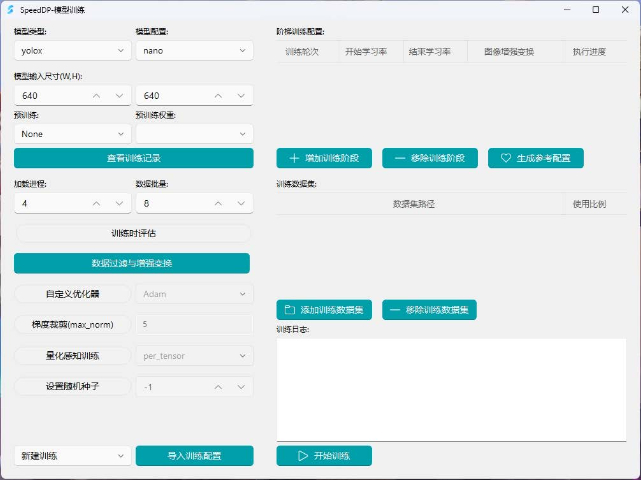
吉林如何圖像標注有哪些SpeedDP是成都慧視光電技術有限公司打造的深度學習算法開發平臺,可運行于Windows或Linux操作系統,可完成自動標注、AI算法(目前支持目標檢測)開發(項目配置、訓練、評估、測試)、模型部署等相關功能,充分保證數據安全的基礎上,幫助客戶減少人力、物力...
2025-01-17 -
北京如何圖像標注技術
我國西部地區地形復雜、天氣多變,許多電網架設在高山流水之間,給電網的巡檢維護造成了不小的困難。于是,不同于傳統人工巡檢的智能化巡檢維護開始逐步應用。這種方式采用無人機加智能化機器人,其中無人機承擔巡檢工作,而智能化機器人進行維護,兩者互相配合。無人機搭載智能化...
2025-01-16 -
廣東省時省力圖像標注功能
無人機的迅猛發展,使得無人機的反制技術也水漲船高,常見的有電子干擾、無人機識別對抗等方式。后者采用圖像識別技術,通過在無人機攝像頭的基礎上加裝AI高性能圖像處理板,在算法的作用下,就具備無人機識別的功能,為無人機對抗創造條件。由于無人機飛行速度極快,因此針對于...
2025-01-16 -
江西企業圖像標注有哪些
目前,采用圖像識別技術來實現無人機規避其他障礙物是一個有效的方法。通過在無人機上植入圖像識別模塊,這個模塊由圖像處理板和相機組合而成,通過算法的賦能,就能針對不同物體實現快速AI識別,然后實現規避。而在圖像處理板的選擇上,成都慧視開發的Viztra-LE026...
2025-01-16 -
廣東多系統適配圖像標注
AI大浪潮下,許多企業都在不斷借助AI來提升自己的行業競爭力,數據標注企業也不例外,傳統的人工標注效率不足的弊端困擾了多年,如今新的“引擎”就在眼前,他們當然不會放過這個機會。針對這樣的需求,慧視光電利用AI模型訓練打造的深度學習算法開發平臺SpeedDP,就...
2025-01-16 -
 四川專業圖像標注哪里買
四川專業圖像標注哪里買近年來,人們越來越認識到深入理解機器學習數據的必要性。不過,鑒于檢測大型數據集往往需要耗費大量人力物力,它在計算機視覺領域的廣泛應用,尚有待進一步開發。通常,在物體檢測中,通過定義邊界框,來定位圖像中的物體,不僅可以識別物體,還能夠了解物體的上下文、大小、以及...
2025-01-16 -
上海哪里有圖像標注哪里買
目前,有許多功能性AI工具可以幫助我們進行圖像標注,其中慧視SpeedDP是針對AI零基礎用戶的低門檻AI開發平臺,提供從數據標注、模型訓練、測試驗證到RockChip嵌入式硬件平臺模型部署的可視化AI開發功能。SpeedDP提供豐富的算法參數設置接口,滿足不...
2025-01-16