-
個性化需求,專屬服務(wù):海綿定制如何滿足多樣化市場-海綿定制
-
如何選擇合適的過濾綿:提升過濾效率與延長使用壽命-過濾綿
-
揭秘物流網(wǎng)格海綿:如何在運輸中提供良好緩沖效果-網(wǎng)格海綿
-
寵物海綿爬梯:為寵物量身定制的沙發(fā)與床間通行神器-海綿爬梯
-
寵物友好家居設(shè)計:海綿爬梯讓沙發(fā)、樓梯、床觸手可及-海綿爬梯
-
如何挑選高效耐用的杯刷海綿:一份實用的購買指南-杯刷海綿
-
淘氣堡海綿材質(zhì)對比,哪種更適合你家孩子-淘氣堡海綿
-
海綿鞋擦:輕松去除鞋面污漬-海綿鞋擦
-
高效去除洗衣機內(nèi)毛發(fā):洗衣球海綿的神奇功效-洗衣球海綿
-
寵物海綿爬梯:安全、舒適且有趣-小型寵物海綿爬梯輔助器報價
吉林如何目標(biāo)檢測應(yīng)用
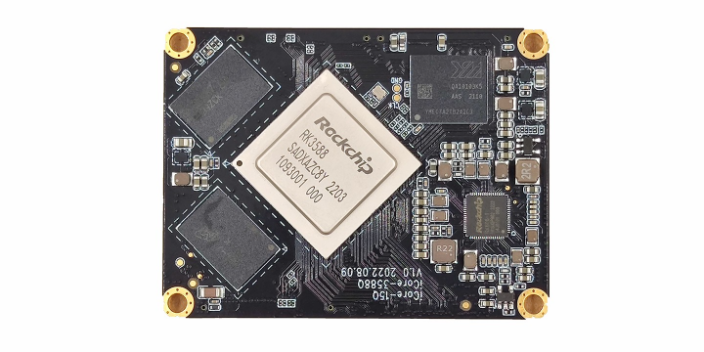
無人機搭載如光電吊艙等帶有攝像頭的設(shè)備后,達(dá)到了實現(xiàn)智能識別的硬件條件,但是傳統(tǒng)的攝像頭只能獲取圖像,并不具備AI識別的功能。無人機AI識別算法的處理器還是在于模仿人眼一樣進(jìn)行視覺處理,然后AI進(jìn)行智能提取和分析圖像,再和訓(xùn)練模型進(jìn)行快速比對,從而在無人機快速飛行的過程中做到實時目標(biāo)識別。首先,要想實現(xiàn)目標(biāo)識別需要的硬件支持就是AI圖像處理板。圖像處理板通過算法的賦能,就能夠?qū)δ繕?biāo)區(qū)域的物體進(jìn)行AI識別分析,從而做出判斷。由于無人機作業(yè)的環(huán)境復(fù)雜,因此對于圖像處理板的要求需要進(jìn)一步提升。成都慧視開發(fā)的Viztra-HE030圖像處理板,采用了工業(yè)級芯片RK3588,采用先進(jìn)架構(gòu),8核(4大4小)處理,算力能夠達(dá)到6.0TOPS。同時,慧視光電能夠根據(jù)需求環(huán)境定制豐富的輸出接口。慧視光電開發(fā)的慧視AI圖像處理板,采用了國產(chǎn)高性能CPU。吉林如何目標(biāo)檢測應(yīng)用
目標(biāo)檢測
無人機被廣泛應(yīng)用于目標(biāo)識別,其機動靈活的特點對地面的被跟蹤對象而言簡直就是降維打擊。搭載攝像頭以及跟蹤板卡等設(shè)備后,無人機可以實現(xiàn)自主飛行,然后通過植入高精度的AI目標(biāo)識別算法,就能夠分析攝像頭范圍內(nèi)的物體,通過AI對特征的進(jìn)一步提取分析,就能夠單獨識別出目標(biāo)物體形狀,并鎖定其位置。這種技術(shù)可以用于各種領(lǐng)域的信息偵查、監(jiān)視、打擊等任務(wù),比傳統(tǒng)的人工模式更安全更高效。要想實現(xiàn)這樣的技術(shù),可以通過在無人機中安裝光電吊艙,然后在吊艙中植入高性能的AI圖像處理板,通過算法的賦能就能夠?qū)崿F(xiàn)。西藏什么目標(biāo)檢測慧視RK3588圖像處理板能實現(xiàn)24小時、無間隙信息化監(jiān)控。
隨著無人機在城市管理領(lǐng)域的大規(guī)模應(yīng)用,采用無人機檢測追蹤地面車輛,然后配合地面攔截,成為一道風(fēng)景線。讓無人機搭載光電吊艙起飛,就能夠通過無人機實現(xiàn)視頻實時傳輸,遠(yuǎn)距離追蹤車輛,實時上傳記錄位置,幫助地面執(zhí)勤提升攔截效率。慧視VIZ-YWT201微型雙光吊艙,集成了可見光攝像機、紅外熱像儀等傳感器,能夠?qū)Φ孛孳囕v進(jìn)行晝夜觀察、識別、捕獲和跟蹤,并及時上報目標(biāo)的圖像和坐標(biāo)信息。利用吊艙和圖像處理板的合作,實現(xiàn)高效追蹤查處“非法車輛”,能夠有效減少事故的發(fā)生,打造安全出行
西氣東輸、西油東送等帶來了大量的油氣管線建設(shè),這些管道呈線性分布,長達(dá)百公里,是我國經(jīng)濟(jì)穩(wěn)定發(fā)展的重要支撐。這些管道有的處在人口密集區(qū),有的則位于山區(qū)、沙漠等環(huán)境惡劣區(qū)域,有些已運行20余年,歷經(jīng)風(fēng)雨,腐蝕、損壞的跡象初顯,存在極大地安全隱患,為保障能源供應(yīng)穩(wěn)定,定期的油氣管線巡檢便必不可少。在過去,管線巡檢全依賴于巡檢工人一步一個腳印走出來,他們必須得沿著長長的管線巡視,檢查管道本體及環(huán)境。特別是對我國西部山區(qū)、西北沙漠和跨越大江大河等管線的巡查,以及在自然災(zāi)害發(fā)生時的巡線檢查,需要消耗大量的人力物力成本,甚至一些區(qū)域還會危及到巡檢人員的人身安全。目標(biāo)檢測圖像分析是人工智能的重要組成部分。
無人機主導(dǎo)下的低空經(jīng)濟(jì)在物流運輸、應(yīng)急救援、智能巡檢、農(nóng)林植保等領(lǐng)域有著突出應(yīng)用,而在輔助無人機進(jìn)行運轉(zhuǎn)的設(shè)備中,吊艙很重要。無人機吊艙中集各類傳感器于一體,能夠在無人機執(zhí)行任務(wù)時,實時識別畫面中的物體,幫助操控者進(jìn)行信息收集,做出判斷。而為了讓無人機進(jìn)一步智能化,慧視光電通過在吊艙中植入高性能的圖像處理板,來實現(xiàn)AI和無人機的有機結(jié)合。這就是慧視VIZ-GT05V三軸雙可見光慣性穩(wěn)定吊艙,它搭載一顆千萬級可見光CMOS傳感器和一顆星光級可見光CMOS傳感器,具備大小兩個視場角,能夠?qū)崟r輸出1080P的高清可見光視頻,可實現(xiàn)夜間微弱光線下的目標(biāo)觀測。慧視AI板卡可以用于大型公共停車場。山東高效目標(biāo)檢測型號
無人機吊艙能夠通過定制算法和精細(xì)定位技術(shù)實現(xiàn)農(nóng)藥精細(xì)噴灑、農(nóng)作物精細(xì)拋糧等操作。吉林如何目標(biāo)檢測應(yīng)用
激光除草模式中AI智能識別是很關(guān)鍵的一環(huán),需要機器人正確識別雜草,而這基于AI的深度學(xué)習(xí)、目標(biāo)識別檢測等功能,通過不斷的訓(xùn)練學(xué)習(xí),AI能夠精細(xì)識別什么是雜草什么是作物。目前,市面上比較好用的AI深度學(xué)習(xí)平臺眾多,例如成都慧視推出的SpeedDP深度學(xué)習(xí)算法開發(fā)平臺,就能夠通過大量的數(shù)據(jù)部署,再經(jīng)過長時間的訓(xùn)練,就能夠?qū)崿F(xiàn)跟人眼一樣的目標(biāo)識別能力。慧視SpeedDP是針對AI零基礎(chǔ)用戶的低門檻AI開發(fā)平臺,提供從數(shù)據(jù)標(biāo)注、模型訓(xùn)練、測試驗證到RockChip嵌入式硬件平臺模型部署的可視化AI開發(fā)功能。SpeedDP功能簡潔、上手快,是當(dāng)下進(jìn)行AI深度學(xué)習(xí)訓(xùn)練的選擇。而且目標(biāo)識別檢測領(lǐng)域,成都慧視開發(fā)的高性能Viztra-HE030圖像處理板,可以通過四大四小處理器高達(dá)6.0TOPS的算力,精細(xì)分析識別到的物體,區(qū)分作物和雜草,進(jìn)而為機器人提供正確的信息,輔助除草。吉林如何目標(biāo)檢測應(yīng)用
- 河北安全目標(biāo)識別工具 2025-01-27
- 河南圖像處理板設(shè)計 2025-01-27
- 河南靠譜的圖像處理板 2025-01-27
- 河南手持激光測距生產(chǎn)商 2025-01-27
- 高性能圖像處理板分析 2025-01-27
- 多系統(tǒng)適配圖像處理板是什么 2025-01-27
- 湖南流暢目標(biāo)識別情況 2025-01-27
- 質(zhì)量圖像處理板定做價格 2025-01-27
- 江蘇手持激光測距生產(chǎn)商 2025-01-26
- 無線圖像處理板零售價格 2025-01-26
- 湖北短效Socks5網(wǎng)站 2025-01-27
- 廣西手機信號增強器廠家 2025-01-27
- 紹興管道作業(yè)票防爆手機生產(chǎn)廠家 2025-01-27
- 山西防塵工業(yè)電話機防護(hù)等級IP66 2025-01-27
- 鹽城特殊作業(yè)票防爆手機生產(chǎn)廠家 2025-01-27
- 橫欄鎮(zhèn)個性化電信寬帶開通 2025-01-27
- 山東人防有線調(diào)度通信系統(tǒng)冗余性 2025-01-27
- 空芯光纖連接器設(shè)備采購 2025-01-27
- 江蘇微機五防價格 2025-01-27
- 四川智能車載稱重管理平臺開發(fā) 2025-01-27